
Modélisation et Paramétrage des Mécanismes
La lecture de la norme NF E 04-015 doit permettre de modéliser les mécanismes* afin d'aborder l'étude des efforts et des mouvements, ce qui impose:

-1- A propos de la modélisation des pièces mécaniques:
---> de connaitre la définition du solide indéformable.
-2- A propos de la définition des liaisons, d'être capable, quel que soit le centre et la direction privilégiée de la liaison:
---> de définir:
- la représentation normalisée (spatiale ou en 2 vues planes);
- les mouvements relatifs autorisés;
- les paramètres de mouvements autorisés.
---> de choisir une modélisation cinématique en fonction de la géométrie et des jeux de fonctionnement (appréciés qualitativement ou définis quantitativement).
-3- A propos du paramétrage de la position d'un solide par rapport à un repère, d'être capable:
---> de définir la position d'un point (coordonnées cartésiennes , cylindriques ou sphériques);
---> de maitriser l'orientation d'une base définie par les angles d'Euler.
-4- De mettre en œuvre ces connaissances pour:
---> établir le schéma cinématique du mécanisme:
- exercice 1 (traité en classe);
- exercice 2 (traité en classe);
- ..................;
- exercice N (traité en classe).
---> définir la loi "entrée-sortie" du mécanisme:
- exercice 1 (traité en classe);
- exercice 2 (traité en classe);
- ..................;
- exercice N (traité en classe).
* Un mécanisme est un ensemble de pièces mécaniques reliées entre elles par des liaisons en vue de réaliser une fonction déterminée.
1-Modélisation des pièces mécaniques
Données & hypothèses d'étude:
Les solides sont considérés INDÉFORMABLES. Ceci exclut bien sûr les pièces dont la fonction est précisément de se déformer: ressorts, rondelles élastiques, barres de torsion, etc.
1-1) Définition d'un solide indéformable
Une pièce mécanique (S) peut être considérée comme un solide indéformable si quels que soient les points A et B de (S), la distance AB reste constante au cours du temps t.


1-2) Quelques exemples de solides usuels
Clé plate

Articulation de vérin

Crochet d'attelage

Vis d'Archimède

Chariot de manutention

Pince à visser

2-Modélisation des liaisons
Définissons les modèles de liaisons, qui existent entre 2 solides (S1) et (S2), que l'on utilisera pour établir les schémas cinématiques des mécanismes.
Pour chaque modèle de liaison, qui est un modèle de RÉFÉRENCE THÉORIQUE, nous donnerons:
---> la définition mathématique;
---> les mouvements relatifs (ou DLL = Degré De Liberté) que la liaison autorise;
---> les schématisations planes et spatiales normalisées sous forme de tableau.
Pour cela, un repère orthonormé direct R(O, x, y, z) sera placé au centre géométrique de chaque liaison.
2-1) Liaison Ponctuelle
Aperçu 3d
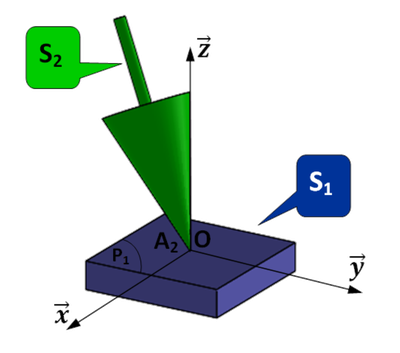
Définition
Les deux solides (S1) et (S2) ont une liaison PONCTUELLE si, au cours de leur mouvement relatif, un point A2 de (S2) reste dans un plan P1 de (S1).
Degré De Liberté (DDL)
Analyse des mouvements relatifs de (S2) par rapport à (S1), soient en Translation (T) et en Rotation (R):
- Tx = 1 ; Ty = 1 ; Tz = 0 (0 = interdit)
- Rx = 1 ; Ry = 1 ; Rz = 1 (1 = autorisé)
- Bilan: 5 DDL
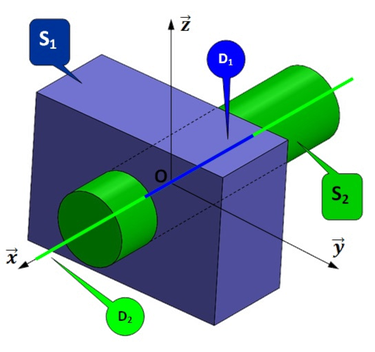
2-3) Liaison Linéaire Annulaire
Aperçu 3d
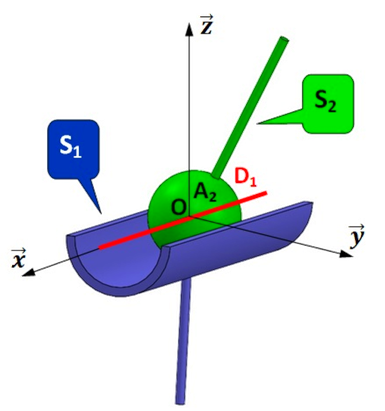
Définition
Les deux solides (S1) et (S2) ont une liaison LINÉAIRE ANNULAIRE si, au cours de leur mouvement relatif, un point A2 de (S2) reste sur une droite D1 de (S1).
Degré De Liberté (DDL)
Analyse des mouvements relatifs de (S2) par rapport à (S1), soient en Translation (T) et en Rotation (R):
- Tx = 1 ; Ty = 0 ; Tz = 0 (0 = interdit)
- Rx = 1 ; Ry = 1 ; Rz = 1 (1 = autorisé)
- Bilan: 4 DDL
2-5) Liaison Appui Plan
Aperçu 3d
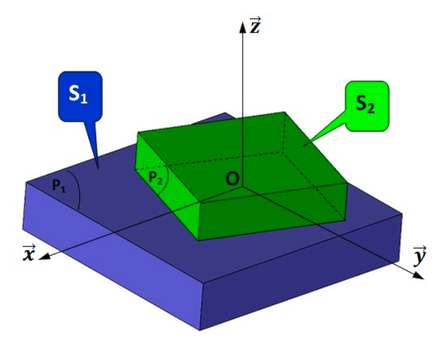
Définition
Les deux solides (S1) et (S2) ont une liaison APPUI PLAN si, au cours de leur mouvement relatif, un plan P2 de (S2) reste confondu avec un plan P1 de (S1).
Degré De Liberté (DDL)
Analyse des mouvements relatifs de (S2) par rapport à (S1), soient en Translation (T) et en Rotation (R):
- Tx = 1 ; Ty = 1 ; Tz = 0 (0 = interdit)
- Rx = 0 ; Ry = 0 ; Rz = 1 (1 = autorisé)
- Bilan: 3 DDL
2-7) Liaison Hélicoïdale
2-9) Liaison Pivot
2-2) Liaison Linéaire Rectiligne
Aperçu 3d
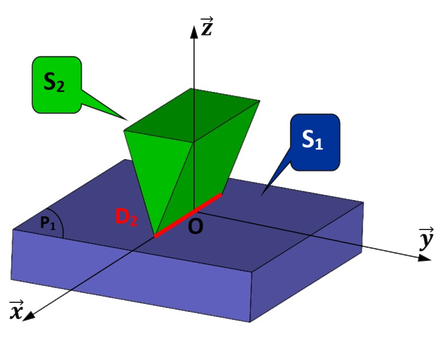
Définition
Les deux solides (S1) et (S2) ont une liaison LINÉAIRE RECTILIGNE si, au cours de leur mouvement relatif, une droite D2 de (S2) reste dans un plan P1 de (S1).
Degré De Liberté (DDL)
Analyse des mouvements relatifs de (S2) par rapport à (S1), soient en Translation (T) et en Rotation (R):
- Tx = 1 ; Ty = 1 ; Tz = 0 (0 = interdit)
- Rx = 1 ; Ry = 0 ; Rz = 1 (1 = autorisé)
- Bilan: 4 DDL
2-4) Liaison Rotule
Aperçu 3d (vue en coupe)
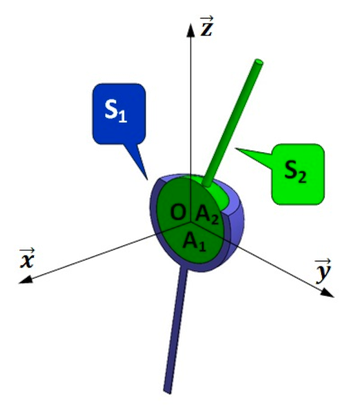
Définition
Les deux solides (S1) et (S2) ont une liaison ROTULE si, au cours de leur mouvement relatif, un point A2 de (S2) reste confondu avec un point sur A1 de (S1).
Degré De Liberté (DDL)
Analyse des mouvements relatifs de (S2) par rapport à (S1), soient en Translation (T) et en Rotation (R):
- Tx = 0 ; Ty = 0 ; Tz = 0 (0 = interdit)
- Rx = 1 ; Ry = 1 ; Rz = 1 (1 = autorisé)
- Bilan: 3 DDL
2-6) Liaison Pivot Glissant
Aperçu 3d
Définition
Les deux solides (S1) et (S2) ont une liaison PIVOT GLISSANT si, au cours de leur mouvement relatif, une droite D2 de (S2) reste confondue avec une droite D1 de (S1).
Degré De Liberté (DDL)
Analyse des mouvements relatifs de (S2) par rapport à (S1), soient en Translation (T) et en Rotation (R):
- Tx = 1 ; Ty = 0 ; Tz = 0 (0 = interdit)
- Rx = 1 ; Ry = 0 ; Rz = 0 (1 = autorisé)
- Bilan: 2 DDL
2-8) Liaison Glissière
2-10) Liaison Encastrement
2-11) Schématisations normalisées des liaisons
2-12) Choix d'une modélisation de liaison
